





Ruchi Sandilya
I am a postdoctoral researcher in the Grosenick Lab at Weill Cornell Medicine, working at the intersection of applied mathematics, control theory, and scientific machine learning. My research develops mathematically grounded machine learning methods to model and control complex dynamical systems in the physical and biological sciences.
Selected Research Projects
Contrastive Diffusion Alignment (ConDA) — 2026
My recent work develops generative models for complex dynamical systems in physics and biomedicine. I introduced Contrastive Diffusion Alignment (ConDA), a framework that organizes diffusion-model latent spaces using contrastive learning so that latent directions correspond to meaningful system dynamics. This alignment enables nonlinear trajectory traversal and controllable generation.
ConDA demonstrates that diffusion embeddings naturally encode dynamical structure and that explicitly aligning this structure enables interpretable and controllable generative surrogates. The method has been validated across diverse domains including fluid flows, neural activity, facial dynamics, and therapeutic neurostimulation, advancing the development of data-driven digital twins for scientific and medical systems.
GitHub Code
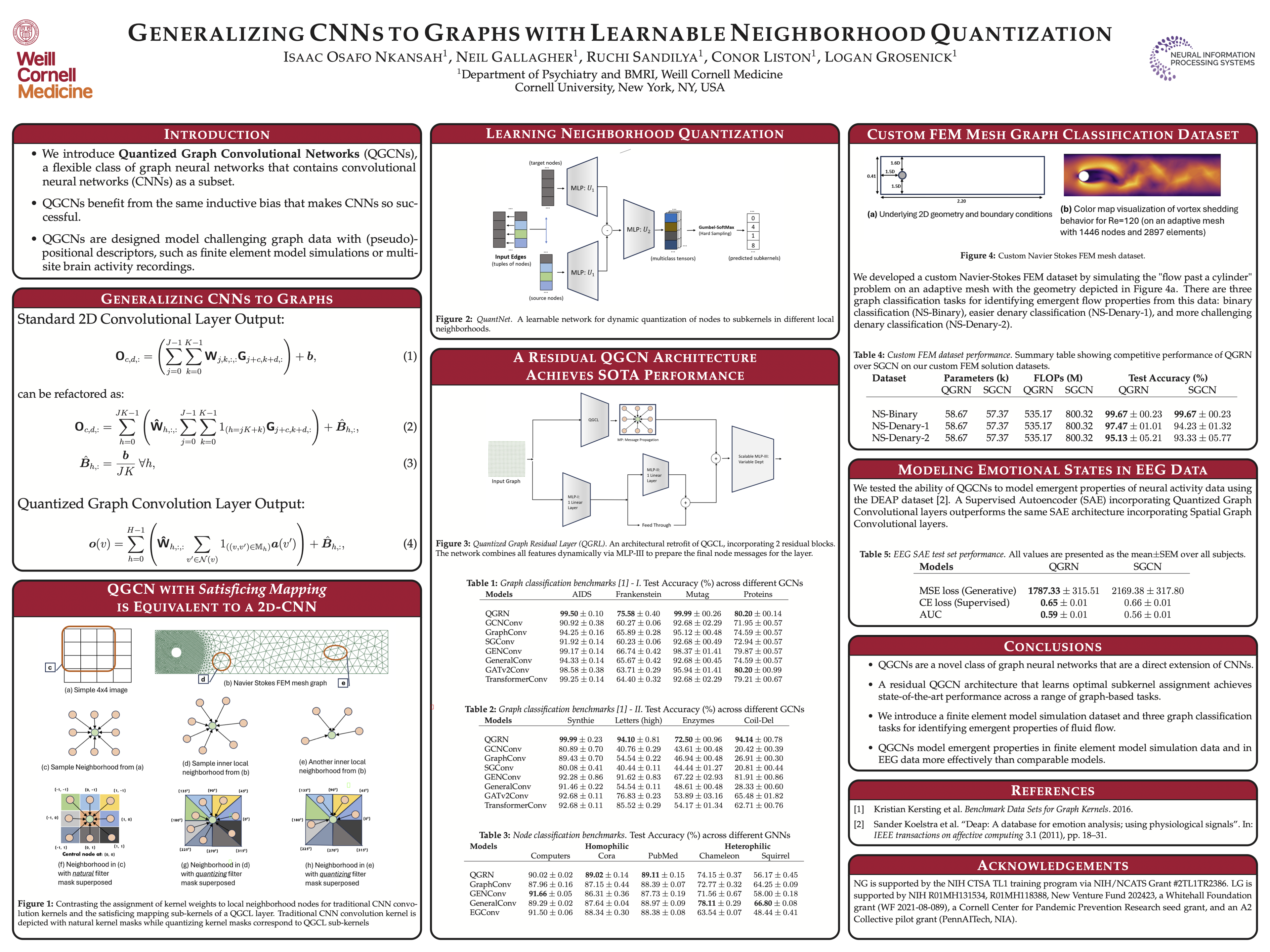
Quantized Graph Convolution Networks (QGCN) — 2024
We introduced Quantized Graph Convolution Networks (QGCNs), a framework extending CNNs to graph-structured data such as biological and social networks. QGCNs decompose convolutions into non-overlapping sub-kernels that adapt naturally to irregular graph domains while retaining the strengths of CNN architectures.
Integrated within a residual network, QGCNs generalize to graphs of arbitrary size and dimension through a learnable multinomial assignment mechanism. The model achieves state-of-the-art performance on benchmark graph datasets and is particularly effective for predicting nonlinear dynamics on finite-element graphs, providing a powerful architecture for scientific machine learning on irregular domains.
Paper Poster GitHub Code
{kind=link}
Feedback Stabilization of the Boussinesq System — 2021
In this project, I developed feedback control laws for stabilizing unstable buoyancy-driven fluid flows governed by the Boussinesq equations. By projecting the linearized system onto unstable modes and solving a low-dimensional Riccati equation, we derived boundary feedback controllers that stabilize velocity and temperature dynamics.
This work demonstrates how control-theoretic model reduction can regulate nonlinear fluid systems, with applications in energy-efficient ventilation, climate control, and aerospace environmental systems.
Slides Video GitHub Code
Discontinuous Finite Volume Methods for PDE-Constrained Optimal Control — 2017
During my PhD, I developed and analyzed discontinuous finite-volume methods for PDE-constrained optimal control problems with pointwise control constraints. The framework addressed elliptic, parabolic, hyperbolic, and Brinkman flow systems using an optimize-then-discretize approach.
I derived a priori error estimates and optimal convergence guarantees, and validated them through numerical experiments. These methods were applied to problems in biomedical modeling, drug transport, fluid mechanics, and energy systems, establishing reliable numerical foundations for control of complex multiphysics systems.
Ph.D. Thesis